BO - Robotique (Poppy - SAWYER - Pepper...)
Bordeaux
Vous consultez actuellement ce cours en tant que Visiteur anonyme.
Cours : BO - Robotique (Poppy - SAWYER - Pepper...) | SAVOIR
-
Tout ouvrir
Tout fermer
-
Semaines robotiques S5 & S6 2019
-
Robot SAWYER co-opère avec le tour HURCO TM8 à commande numérique
-
The robot SAWYER feed the HURCO lathe TM8 with samples....
112.2 Mo · Déposé le 19 juil. 17, 15:19 -
The robot SAWYER feed the HURCO lathe TM8 with samples....
177.2 Mo · Déposé le 19 juil. 17, 15:22 -
Étape 1 : Tommy ouvre la porte du TM8, puis la referme.
25.2 Mo · Déposé le 8 févr. 17, 13:25 -
Étape 2 : Tommy ouvre la porte du TM8, va chercher une éprouvette et la place entre les mors du TM8, pui il referme la porte.
69.8 Mo · Déposé le 16 févr. 17, 12:48
-
-
La plateforme Poppy à l'ENSAM Talence
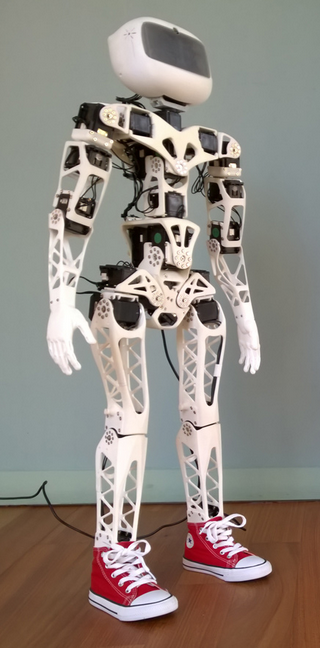 Popppy est une plate-forme Open Source crée par l'équipe Flowers de l'INRIA dédiée à la création, la manipulation et au partage. Le projet poppy-project est accessible à cette adresse : www.poppy-project.org. Il comporte plusieurs créatures basées sur l'impression additive, dont Poppy humanoid et Poppy torso, que vous pouvez visiter dans les onglets ci-dessous.
Popppy est une plate-forme Open Source crée par l'équipe Flowers de l'INRIA dédiée à la création, la manipulation et au partage. Le projet poppy-project est accessible à cette adresse : www.poppy-project.org. Il comporte plusieurs créatures basées sur l'impression additive, dont Poppy humanoid et Poppy torso, que vous pouvez visiter dans les onglets ci-dessous.Au centre ENSAM de Bordeaux-Talence, le robot poppy est utilisé depuis 2015 comme support pédagogique dans plusieurs cursus :
- Cursus Bachelor - 2me année
le Fil rouge Poppy permet aux élèves de travailler sur la conception, la fabrication et la programmation de dispositifs basés sur la plate-formae Poppy Torso :
2015-2016 : Dispositif préhenseur se substituer aux mains fixes de poppy torso.
2016-2017 : Support mobile permettant à un Poppy Torso de se déplacer sur un sol plan.
2017-2018 : Perfetionnement de la plateforme mobile pour PoppyTorso.
2018-2019 : "Bras de perçage" pour Poppy brocoleur.
2019-2020 : Intégration de la vision par réseaux de neurones et du pilotage de nouveaux préhenseurs.
La plateforme poppy torso sert ainsi de support aux principales diciplines enseignées en Bachelor 2ème année : mécanique, matérieux, conception, CAO, programmation Python....
- Cursus Ingénieur (PGE) - 2ème année
Les élèves de 2ème année doivent réaliser deux projets d'environ 40 heures.
2015-2016 : un groupe de 4 élèves a travaillé sur le projet "Poppy sans aucun fil":
-> modification de la CAO de poppy humanoid pour intégrer le support d'un jeu de batteries Lithium-Ion en remplacement de l'alimentation secteur (faisabilité étudiée par Gabriel Rizzo en stage SFE à l'ENSAM en 2015 voir la page GitHub)
-> test et mesure du courant consommé avec une carte ARDUINO munie d'un capteur à effet Hall.
2017-2018 : un groupe de 4 élèves travaille sur une main anthropomorhique pour Poppy.
Premier semestre : état de l'art, recherche de solutions. Deuxième semestre : conception et réalisation de la main. -
Le "Fil rouge Poppy" des Bachelors 2017-2018
-
Le "Fil rouge Poppy" des Bachelors 2016-2017
-
Dossiers des Préhenseurs Poppy Torso - Bachelor ENSAM 2016
-
-
-


Copyright 2016
Mickaël AUDUREAU
Maxime BERENGUER
Jon BIDART
Clément CAZAUTETS
Nicolas GOUDET
Louis MOREL -

Copyright 2016
Florian BOURDERES
Julie DELCAN
Grégory MOINAIN
Camille POTTIER-BONNET
Yvain TEA
Clément TURPAIN -
-

Copyright 2016
Sébastien BOURGEOIS
Maria CORDERO
Clément DANCAUSSE
Bryan DUMAIL
Martin JANY
Arnaud PLANTADE
-
-
Documents de référence pour Poppy Torso

-
Le lien vers les pages Poppy torso du site poppy-project.org. À visiter avant de commencer un projet avec la créature Poppy torso !
-
-
Documents de référence pour Poppy Humanoid
-
Le lien vers le projet poppy-project du site GitHub, qui fournit toutes les information sur le projet Poppy de l'INRIA.
-
Lien vers la page poppy-project du site GitHub qui propose les fichiers CAO de Poppy humanoid (STEP, Solidworks et STL).
-
Ce lien explique comment utiliser le simulateur V-REP pour piloter en temps réel un robot poppy humanoid dans le simulateur.
Le pilotage est fait en utilisant le module Python pypot dans une notebook IPython.
-
-

