La plateforme Poppy à l'ENSAM Talence
Section: La plateforme Poppy à l'ENSAM Talence | BO - Robotique (Poppy - SAWYER - Pepper...) | SAVOIR
-
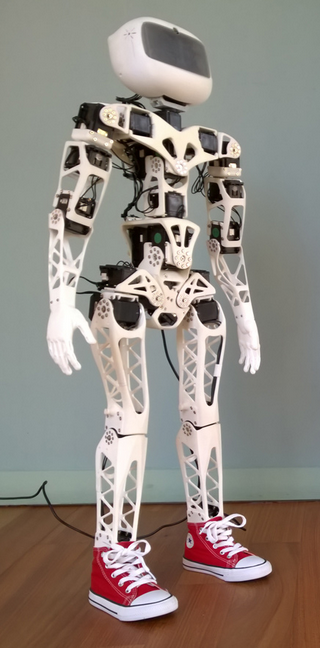 Popppy est une plate-forme Open Source crée par l'équipe Flowers de l'INRIA dédiée à la création, la manipulation et au partage. Le projet poppy-project est accessible à cette adresse : www.poppy-project.org. Il comporte plusieurs créatures basées sur l'impression additive, dont Poppy humanoid et Poppy torso, que vous pouvez visiter dans les onglets ci-dessous.
Popppy est une plate-forme Open Source crée par l'équipe Flowers de l'INRIA dédiée à la création, la manipulation et au partage. Le projet poppy-project est accessible à cette adresse : www.poppy-project.org. Il comporte plusieurs créatures basées sur l'impression additive, dont Poppy humanoid et Poppy torso, que vous pouvez visiter dans les onglets ci-dessous.Au centre ENSAM de Bordeaux-Talence, le robot poppy est utilisé depuis 2015 comme support pédagogique dans plusieurs cursus :
- Cursus Bachelor - 2me année
le Fil rouge Poppy permet aux élèves de travailler sur la conception, la fabrication et la programmation de dispositifs basés sur la plate-formae Poppy Torso :
2015-2016 : Dispositif préhenseur se substituer aux mains fixes de poppy torso.
2016-2017 : Support mobile permettant à un Poppy Torso de se déplacer sur un sol plan.
2017-2018 : Perfetionnement de la plateforme mobile pour PoppyTorso.
2018-2019 : "Bras de perçage" pour Poppy brocoleur.
2019-2020 : Intégration de la vision par réseaux de neurones et du pilotage de nouveaux préhenseurs.
La plateforme poppy torso sert ainsi de support aux principales diciplines enseignées en Bachelor 2ème année : mécanique, matérieux, conception, CAO, programmation Python....
- Cursus Ingénieur (PGE) - 2ème année
Les élèves de 2ème année doivent réaliser deux projets d'environ 40 heures.
2015-2016 : un groupe de 4 élèves a travaillé sur le projet "Poppy sans aucun fil":
-> modification de la CAO de poppy humanoid pour intégrer le support d'un jeu de batteries Lithium-Ion en remplacement de l'alimentation secteur (faisabilité étudiée par Gabriel Rizzo en stage SFE à l'ENSAM en 2015 voir la page GitHub)
-> test et mesure du courant consommé avec une carte ARDUINO munie d'un capteur à effet Hall.
2017-2018 : un groupe de 4 élèves travaille sur une main anthropomorhique pour Poppy.
Premier semestre : état de l'art, recherche de solutions. Deuxième semestre : conception et réalisation de la main.
