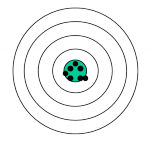
Cocher les qualités qui s'appliquent à un robot dont on a enregistré les déplacements successifs vers une même position :
Homogène
Précis
Linéaire
Répétable
Maintenable